 Danielle Ribeiro
Danielle Ribeiro
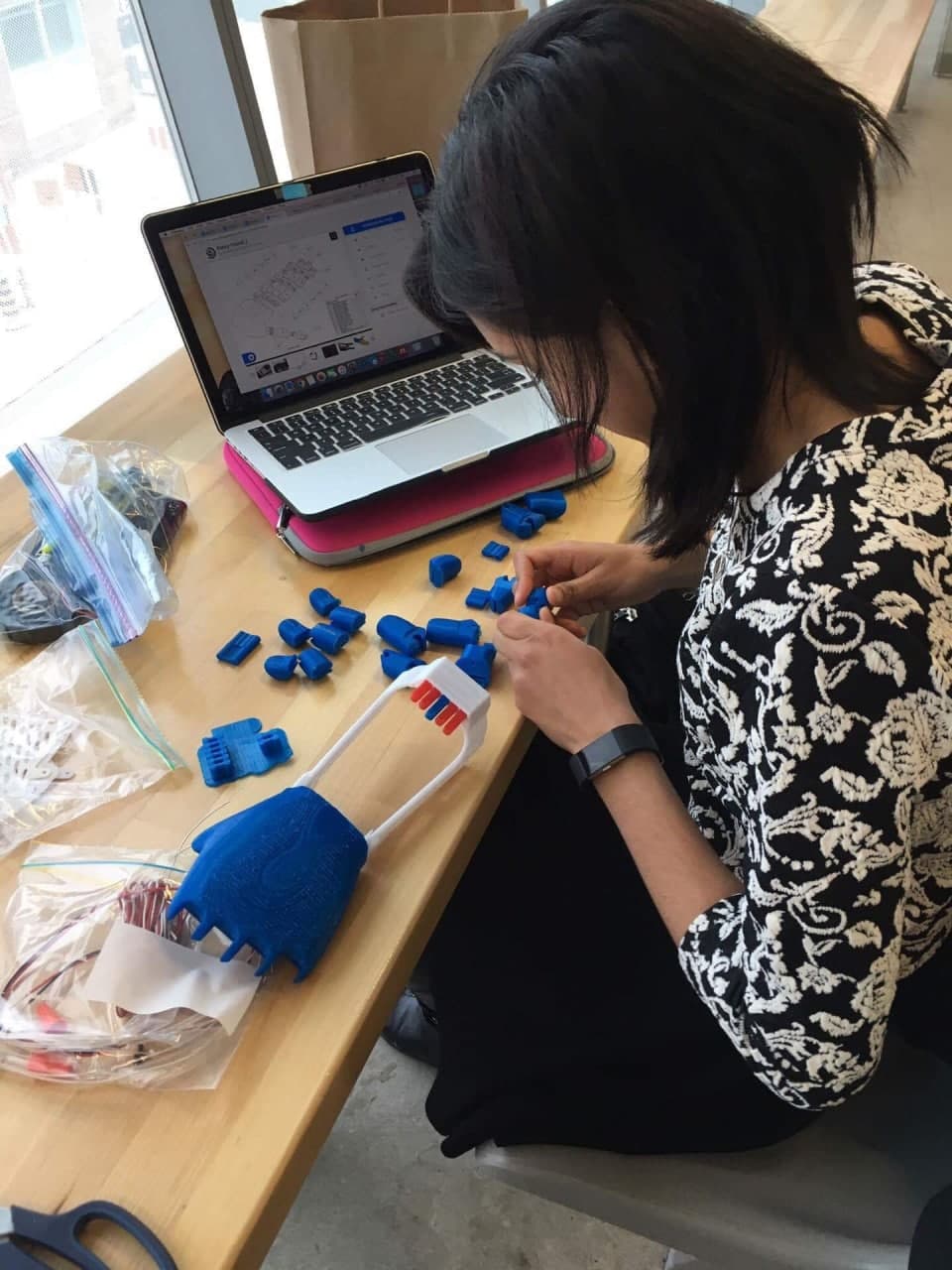
Handling a 3D printed prosthetic project
Project Lead, Tetra Ryerson (Sep. 2016- Apr. 2018)
Working in collaboration with Dr. Amanda Mayo from Sunnybrook St. John’s Rehabilitation Centre my Tetra Ryerson project team and I were able to design and build a working 3D-printed prosthetic arm that uses wrist movements to control prosthetic finger movements. Additional small LED lights were attached to the prosthetic to create enough heat to be detected by Leap Motion.
Through this project, I gained an interest in learning more about the adoption of innovative manufacturing technology in healthcare.
The Goal
- Create a lightweight and inexpensive body powered device that can engage and encourage patients during their physical therapy sessions through the integration of the virtual reality software, Leap Motion
My Role
Project Lead
- Manage the design and development for a 3D printed prosthetic arm
Work Conducted
- 3D print design and execution
- Electrical wiring for the LED lights
- Assembly of 3D printed parts
- Create written proposal and presentation
Skills Developed
Technical
- Use of 3D printer with various materials (PLA, PETG & NinjaFlex)
- Electrical experience connecting LED lights to the prosthetic hand with an external power source

Non-technical
- Communication and collaboration with student peers and clinicians
Challenges & Learnings
Challenge 1
- How do you determine the right settings for the 3D printer (such as build plate, external and internal supports etc.)?
Approach to Overcome Challenge 1
- Research and understand how the various settings on the 3D printer work to build your object
- If the budget allows, try different settings and adjustments for the 3D printed pieces and test these pieces
Lessons Learned
- Settings on the 3D printer vary for each print, some prints require different build plate temperatures, printer speeds, printer nozzle thickness, bed and nozzle temperature, internal and external supports as well as overhang.
- These setting requirements are important for a successful build and require practice and multiple attempts to achieve the appropriate settings.

Challenge 2
- How do you build the device when some of the 3D printed parts were slightly different than expected and did not fit together properly?
Approach to Overcome Challenge 2
- Either adjust the design of the object or manually change the measurements of the parts by using a sander, drill etc.
Lessons Learned
- If on a tight deadline, drilling and sanding the PLA plastic was an effective method of adjusting malformed objects, however it is important to go slowly as to not crack the plastic.
- WD40 also temporarily improved movement between parts, however is not a long term solution.
- It is most beneficial to re-print the objects with slight adjustments to size.
Deliverables Produced
- Developed a 3-D printed, light and inexpensive body powered prosthetic limb that can be detected by Leap Motion
- Presented the project details and deliverables at the Ryerson Tetra Conference 2017
Awards & Recognition
- Featured in the Toronto Metro Newspaper, Ryerson Newspaper (Eyeopener), Ryerson
- Radio Station (The Scope) Segment, and Ryerson Today School online magazine
- Recognition from President and Vice-Chancellor of Ryerson for development of prosthetic limb that could be detected by Leap Motion for rehabilitation purposes
- Won second prize (monetary) at Ryerson Tetra Conference 2017
Next Steps
No active next steps at the moment. We might consider refining the initial prototype.
{kind=link}